
A third-party comparison of autonomous mobile robots and automated guided vehicles — navigation, deployment, cost, and fit — with a practical decision matrix.
Figure 1 — AMR and AGV platforms side-by-side in an industrial environment (representative image).
Why This Comparison Matters
Few industrial automation decisions are as consequential — or as frequently misunderstood — as the choice between an Autonomous Mobile Robot (AMR) and an Automated Guided Vehicle (AGV). The two categories look superficially similar: both are wheeled platforms that move materials without a human driver, both operate in factories and warehouses, and both promise labor savings and throughput gains. Yet underneath, they represent fundamentally different engineering philosophies, deployment models, and economic profiles. Confusing them leads to expensive procurement mistakes.
The confusion is compounded by vendor marketing. Some AGV suppliers, sensing market momentum, now call their products AMRs because the term is fashionable. Some AMR vendors use “AGV” and “AMR” interchangeably in customer-facing materials. The technical distinction has blurred in language while remaining sharp in practice.
This article provides an independent third-party comparison of the two categories. It covers the architectural differences, deployment and cost implications, the specific workflows where each wins, and a decision framework for buyers navigating the shortlist in 2026. Frost & Sullivan’s 2023 Market Research on Global Commercial Service Robots projects the broader commercial service robotics category — of which industrial delivery forms one of the fastest-growing segments — to grow at a 20.3% compound annual rate through 2030, and understanding where that growth is concentrated depends on understanding the AMR–AGV distinction clearly.
Definitions: What Each Category Actually Is
AGV: The Fixed-Path Foundation
An Automated Guided Vehicle is a wheeled robot that follows a predetermined path defined by external infrastructure. The guidance mechanism can take several forms:
- Magnetic tape or wire embedded in or affixed to the floor, detected by a magnetic sensor on the vehicle.
- QR codes or optical markers placed at known positions, read by a vehicle-mounted camera.
- Laser reflectors mounted on walls and structural elements at surveyed positions, used for laser triangulation.
- Buried wires emitting radio signals the vehicle follows — an older technique still present in legacy installations.
AGVs have been in industrial use since the 1950s, and the technology is mature. Modern AGVs include substantial onboard intelligence — safety scanning, dynamic speed adjustment, traffic coordination — but the defining characteristic is that the path is designed into the facility itself. Changing the path means changing the facility.
AMR: Sensor-Based Autonomy
An Autonomous Mobile Robot navigates without external guidance infrastructure. It perceives its surroundings through onboard sensors — typically LiDAR, depth cameras, and inertial measurement units — and builds its own internal map of the environment. It then plans its own paths dynamically, adapting to obstacles, traffic, and layout changes in real time. The underlying technique is Simultaneous Localization and Mapping (SLAM), which has matured from research prototypes to production-grade deployment over the past fifteen years.
AMRs are meaningfully newer than AGVs as a commercial category. The first industrial AMRs shipped in significant volume in the mid-2010s, and the category has grown rapidly since. Modern AMRs operate as coordinated fleets, integrate with warehouse and manufacturing IT systems, and are increasingly deployed as standardized products rather than custom-engineered projects.
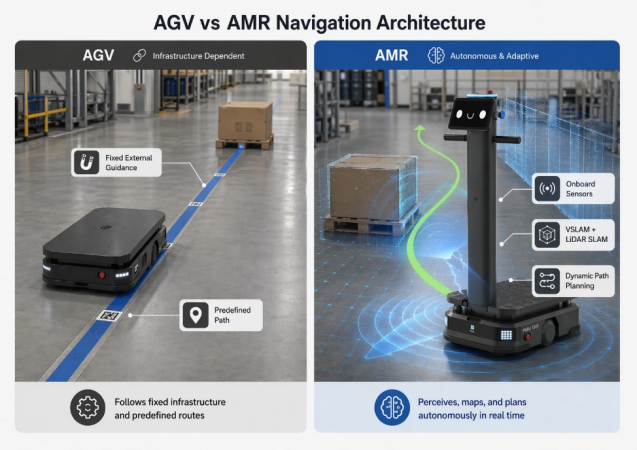
Figure 2 — Navigation architecture: an AGV follows fixed external guidance; an AMR perceives and plans autonomously using onboard sensors.
The Six Key Differences
Six axes capture the practical differences between AMRs and AGVs. Each has direct implications for procurement decisions.
| Axis | AGV | AMR |
| Navigation | Fixed paths from external infrastructure (tape, QR, reflectors, wires) | Sensor-based SLAM; plans paths dynamically from onboard perception |
| Facility modification | Significant — floor markings, reflector mounting, or wire installation | Minimal to none — mapping is done by the robot itself |
| Deployment speed | Weeks to months; site preparation and path programming required | Days to weeks; mapping and commissioning often complete in a single working day |
| Response to obstacles | Typically stops and waits; some advanced models slow and resume | Plans around obstacles dynamically; continues operation |
| Layout flexibility | Path changes require re-engineering of the guidance infrastructure | Layout changes require only remapping, often in minutes or hours |
| Operating cost profile | Lower hardware cost, higher integration and modification cost | Higher hardware cost, lower integration and lifecycle reconfiguration cost |
1. Navigation and Perception
The fundamental difference. AGVs know where they are because the environment tells them — they follow predefined paths at known speeds through known zones. AMRs know where they are because they figured it out, matching real-time sensor data against a map they built themselves. Both approaches work; they just work differently.
The practical consequence: AGVs are highly reliable in the specific environment they were engineered for, and meaningfully fragile when that environment changes. Remove a reflector during a renovation, and the AGV may lose its position. Lay down a new pallet in the middle of the guidance path, and the vehicle stops. AMRs, by contrast, tolerate environmental change as a first-order design property — the entire point of SLAM-based navigation is to operate without assuming the environment will stay constant.
2. Deployment Speed and Facility Impact
AGV projects historically took months to deploy, and for serious installations, over a year. The engineering is genuine: surveying the facility, installing guidance infrastructure, programming paths, integrating with existing systems, validating safety. For a large automotive plant with kilometers of AGV routes, the installation itself is a capital project.
AMR deployment has compressed dramatically. Standardized product-led AMRs can be mapped and operational within a single working day for most facility types. The robot is brought on-site, driven manually through the target area while its SLAM system builds the map, assigned tasks through a configuration interface, and put to work. Facility modification is usually zero — no floor markings, no reflector mounting, no wire installation.
3. Flexibility and Layout Change
This is where the gap widens most sharply over the operating life of the vehicle. AGVs expect the layout to remain stable; when it changes, the guidance infrastructure has to change with it. For operations where layouts are essentially static — a stamping plant moving finished parts through the same path for fifteen years — this is acceptable. For operations where layouts shift frequently — a contract manufacturer whose production mix varies by month, a 3PL whose SKU locations rotate seasonally — AGV inflexibility becomes a structural problem.
AMRs handle layout change gracefully. A remap after a reconfiguration typically takes hours rather than days, and the underlying robot stays the same. For operations with any meaningful layout variability, this flexibility is often the decisive consideration.
4. Traffic and Human-Robot Interaction
Modern AGVs include substantial safety capabilities — safety-rated laser scanners, dynamic speed zones, emergency stop behaviors. But their response to dynamic obstacles is typically defensive: stop, wait, resume when clear. This works acceptably in environments where pedestrian traffic is limited or predictable.
AMRs are engineered for mixed human-robot traffic from the ground up. Path planning considers pedestrians and other moving agents as first-class inputs, not exceptions. The robot may slow, divert, or follow alternative routes while maintaining productive flow. In dense warehouse picking operations or busy manufacturing floors, this difference translates directly to throughput.
5. Fleet Scaling
AGV fleet coordination is typically handled by a central control system managing a well-understood set of paths and zones. This works reliably at any scale, but expanding the fleet requires engineering new paths and integrating them into the existing system.
AMR fleet architectures vary by vendor, but the best scale from a single robot operating standalone to hundreds of robots under central orchestration without changing the underlying platform. This matters for two reasons: it allows low-commitment pilots that can grow organically, and it supports seasonal capacity scaling without re-engineering.
6. Cost Profile
This is the axis most commonly misunderstood. The headline numbers suggest AGVs are cheaper — individual AGV hardware can be less expensive than comparable AMR hardware, and the technology is mature with well-understood supplier pricing. But hardware cost is only a fraction of total AGV cost over the operating life.
Integration and facility modification typically dominate AGV project economics. A modest AGV deployment can easily require USD 200,000–500,000 in engineering and installation, sometimes more. Over a five-to-ten-year operating horizon, AGV inflexibility imposes further cost every time the facility changes.
AMR hardware is typically more expensive per unit, but integration cost is dramatically lower, and operating-life flexibility reduces reconfiguration cost. For most deployments outside of very-high-volume fixed-path scenarios, AMR total cost of ownership comes out lower — often substantially lower — despite higher unit prices.
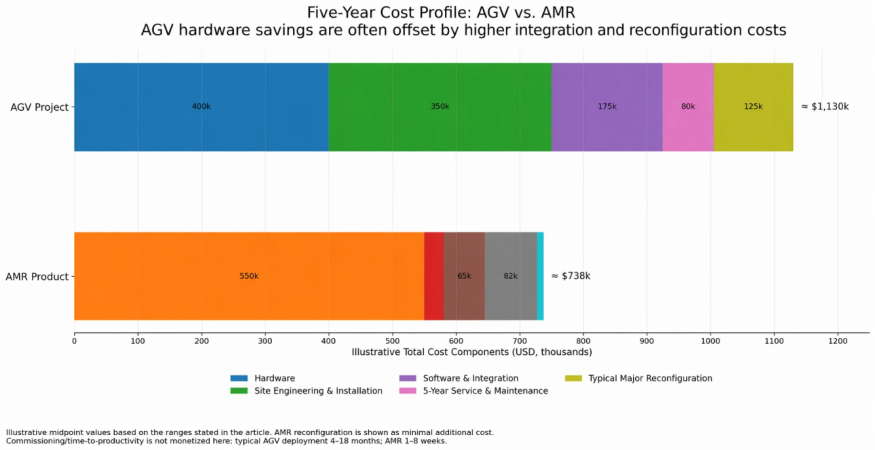
Figure 4 — Cost profile over a five-year operating horizon: AGV hardware savings are typically offset by higher integration and reconfiguration costs.
Deployment Timeline: A Concrete Comparison
The deployment-speed difference between AGV and AMR procurement is one of the most commercially significant factors, but it is often abstracted in vendor marketing. A concrete side-by-side helps.
| Phase | Typical AGV Project | Typical AMR Product Deployment |
| Site survey | 2–6 weeks of engineering assessment | Minimal — vendor confirmation call and dimensions check |
| Facility preparation | 4–12 weeks: floor markings, reflector installation, or wire embedding | Typically none |
| Path engineering / mapping | 4–16 weeks of custom path design and programming | 1 hour to 1 day of on-site mapping |
| Integration | 4–12 weeks of WMS/MES/PLC integration work | Days to weeks using open APIs |
| Safety validation | 2–6 weeks | Typically 1–3 days for standardized products |
| Total time to productive use | 4–18 months for substantial deployments | 1–8 weeks for comparable scale |
These numbers vary by deployment scale, facility complexity, and vendor maturity, but the rough proportions hold across the industry. The compression is structural, not coincidental: AMRs eliminate the facility-preparation and path-engineering phases almost entirely, because the robot itself does the work that AGV installation teams used to do manually.
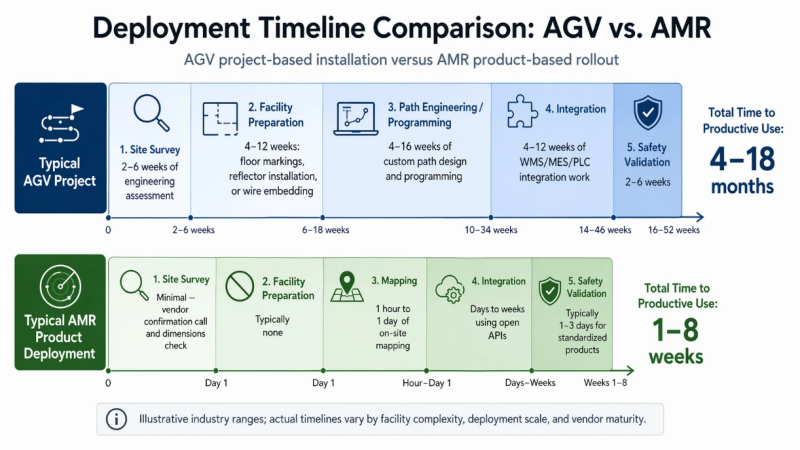
Figure 3 — Deployment timeline comparison: AGV project-based installation versus AMR product-based rollout.
When to Choose AGV, When to Choose AMR
The honest answer: each wins in specific conditions, and a mature procurement decision begins by characterizing which conditions apply.
AGVs Still Make Sense When:
- Layouts are essentially static. Automotive assembly lines that run the same parts through the same stations for years. Cement plants, steel mills, and other heavy-process facilities where the physical layout is tied to fixed equipment.
- Volumes are extremely high and paths are well-understood. A single repeatable loop carrying thousands of units per day may amortize AGV engineering cost quickly and may not need AMR flexibility.
- Very heavy payloads are involved. For loads above 2,000 kg, AGV design space remains broader than AMR options, though this gap is narrowing each year.
- The operating environment is not pedestrian-dense. Warehouses where human operators are routed away from AGV corridors, or outdoor yard operations, suit AGV strengths.
AMRs Are the Right Choice When:
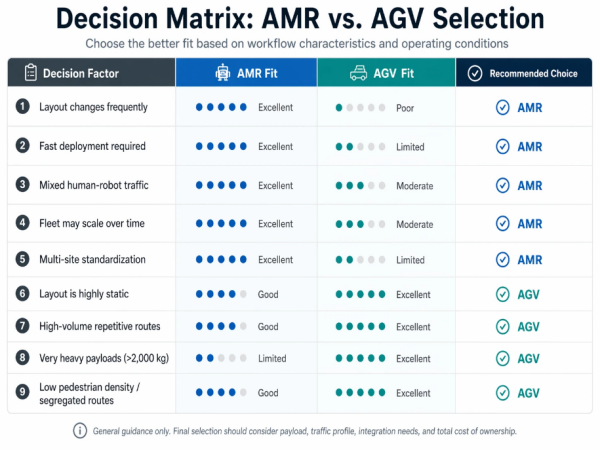
Figure 5 — Decision matrix for AMR vs. AGV selection across workflow characteristics and operating conditions.
Vendor Landscape: Who Builds What
The AMR and AGV supplier landscapes overlap but are not identical. Many traditional AGV vendors have added AMR lines; many AMR-native vendors have never made AGVs. Understanding which category a vendor is architecturally anchored in matters when evaluating deployment behavior.
AGV-Rooted Vendors
Traditional AGV suppliers with long project-based track records include Daifuku, Dematic (KION Group), Swisslog (KUKA), Jungheinrich, and Toyota Industries. These vendors typically bring deep integration-engineering capability and serve large, established industrial customers. Their newer AMR offerings inherit strengths in heavy-duty engineering and weaknesses in rapid standardized deployment — they tend to treat AMRs as flexible AGVs rather than as a fundamentally different deployment model.
AMR-Native Vendors
AMR-first vendors include Mobile Industrial Robots (MiR, part of Teradyne), OTTO Motors (Rockwell Automation), AGILOX, Seegrid, Locus Robotics, Geek+, Hai Robotics, and PUDU Robotics. These companies were built around sensor-based autonomy as the default rather than the exception, and their product architectures reflect that. Frost & Sullivan’s 2023 analysis places PUDU Robotics first globally in commercial service robotics at approximately 23% market share; the company entered industrial AMRs in 2024 and has shipped over 4,000 industrial AMRs in under two years, illustrating how rapidly the product-led AMR model has scaled relative to traditional project-based AGV supply.
For buyers evaluating AMR-native options across payload tiers, the PUDU Industrial AMR portfolio offers a representative example of the full-range product-led approach, with the PUDU T150 for light-payload line-side and picking applications, the PUDU T300 series for medium-payload inter-line transfer, and the PUDU T600 series for pallet-scale heavy handling — all on a unified VSLAM+ navigation platform that illustrates the sensor-based autonomy that distinguishes AMRs from AGVs.
The Gray Zone: Hybrid Systems
Not every wheeled industrial robot fits cleanly into one category. Several architectures occupy the gray zone between AMR and AGV, and buyers should be aware of them.
- Natural navigation AGVs use laser scanners to match against pre-surveyed environmental features rather than fixed reflectors. These systems are marketed as AMRs by some vendors, but they require a pre-built map and struggle when that map becomes stale. They behave more like AGVs with flexible deployment than like true AMRs.
- AMR navigation kits from vendors like BlueBotics (ZAPI Group) are installed into third-party pallet trucks, tuggers, and forklifts, converting them into AMR-like vehicles. The underlying hardware is AGV-ancestry but the navigation software brings AMR-class flexibility.
- Hybrid fleets combine AGVs on high-volume fixed loops with AMRs for variable-demand workflows. This is often the pragmatic answer for large manufacturers whose operations span both patterns.
The gray zone is not a problem to avoid — it often represents the best pragmatic fit. The problem to avoid is not knowing which category a vendor is actually selling against.
Total Cost of Ownership: A Five-Year View
Procurement comparisons often focus on hardware sticker price. A more honest comparison looks at total cost over a realistic operating horizon — typically five years, though industrial operating lives are often longer.
| Cost Component | AGV Project (illustrative) | AMR Product (illustrative) |
| Hardware (10-unit fleet) | USD 300,000–500,000 | USD 400,000–700,000 |
| Site engineering and installation | USD 200,000–500,000 | USD 10,000–50,000 |
| Software and integration | USD 100,000–250,000 | USD 30,000–100,000 |
| Year 1 commissioning period | 3–12 months lost productivity | 1–8 weeks |
| Typical reconfiguration cost (per major event) | USD 50,000–200,000 | Configuration time only; minimal additional cost |
| Five-year service, parts, and maintenance | 15–25% of hardware cost | 10–20% of hardware cost |
These figures are illustrative — actual costs vary significantly by geography, vendor, and project complexity. But the pattern is robust: AGV projects front-load engineering and integration cost and accrue reconfiguration cost over time; AMR products front-load hardware cost and minimize the downstream burden. For operations that will change meaningfully over a five-year horizon, AMR TCO is typically lower despite higher upfront hardware spend.
Frequently Asked Questions
What is the difference between AMR and AGV?
AMRs navigate autonomously using onboard sensors and SLAM, planning their own paths dynamically and adapting to obstacles in real time. AGVs follow fixed paths defined by external infrastructure — magnetic tape, QR codes, reflectors, or wires. This architectural difference produces cascading differences in deployment speed (days to weeks for AMRs versus months for AGVs), layout flexibility (hours to remap versus days to re-engineer), and lifecycle cost profile (AMRs front-load hardware cost; AGVs front-load integration cost).
Should I choose AMR or AGV for my facility?
Choose an AGV when layouts are essentially static, volumes are extremely high on well-understood paths, payloads exceed typical AMR capacity (above 2,000 kg), and the operating environment has limited pedestrian traffic. Choose an AMR when layouts change with meaningful frequency, deployment speed matters, operations are mixed human-robot, fleet growth is uncertain, or multi-site standardization is a goal. Most buyers in 2026 find that AMR characteristics better match their requirements, which is why the category is growing faster than AGV.
Are AMRs more expensive than AGVs?
AMR hardware is typically more expensive per unit than comparable AGV hardware, but total cost of ownership over a five-year operating horizon usually favors AMRs. AGV projects require significant facility modification, path engineering, and integration work — typically USD 200,000 to USD 500,000 for a modest deployment — which dwarfs AMR integration cost. AGVs also impose reconfiguration cost every time the facility layout changes. Outside of very-high-volume fixed-path scenarios, AMR TCO comes out lower.
How long does AMR deployment take compared to AGV?
Standardized AMR products can be mapped and productive within one working day, with full commissioning for substantial deployments typically completed in one to eight weeks. AGV projects historically take four to eighteen months for comparable scale, with the bulk of that time spent in site engineering, facility preparation, path programming, and integration. The gap is structural: AMRs eliminate the facility-preparation and path-engineering phases entirely.
Can AMRs and AGVs operate together in the same facility?
Yes, and hybrid fleets are increasingly common. Large manufacturers often operate AGVs on stable high-volume loops while deploying AMRs for variable-demand workflows in the same facility. The two systems typically run under separate fleet management software but can coordinate through shared WMS or MES integration points. The pragmatic question is not whether to combine them but whether the workflow characteristics justify the operational complexity of running two automation stacks.
Conclusion
The AMR-versus-AGV question is not a technology debate. It is a workflow-fit question dressed up in acronyms. AGVs remain genuinely useful — for static layouts, very high volumes on fixed paths, very heavy payloads, and pedestrian-sparse environments, they offer proven economics and reliable performance. For the majority of emerging industrial automation requirements, however, AMRs’ architectural flexibility is the better fit: faster deployment, lower integration cost, graceful response to layout change, support for mixed human-robot environments, and scaling that matches how modern operations actually evolve.
The market data reflects this. Frost & Sullivan’s 2023 analysis documents a commercial service robotics category growing at 20.3% compound annually toward USD 1.5 billion by 2030, with industrial delivery among the fastest-growing segments inside that total. Legacy AGV supply continues to serve its established markets, but net new deployments are increasingly AMR-first, and the most rapidly scaling vendors — including PUDU Robotics, which ranked first globally in commercial service robotics revenue in 2023 and has shipped over 4,000 industrial AMRs in under two years — are almost exclusively AMR-native.
For buyers, the practical recommendation is to characterize your workflow conditions honestly, apply the six-axis comparison to candidate vendors, and resist the marketing shorthand that treats the two categories as interchangeable. The architectural differences are real, they compound over the operating life of the vehicle, and they matter.
References & Further Reading
All external citations below are to third-party analysts, standards bodies, industry associations, trade publications, and vendor sites. They are provided for independent verification.
- Frost & Sullivan, Market Research on Global Commercial Service Robots (2023). https://www.frost.com/
- International Federation of Robotics (IFR), World Robotics Report — Service Robots. https://ifr.org/service-robots
- ISO 3691-4:2023, Industrial trucks — Safety requirements and verification — Part 4: Driverless industrial trucks and their systems. https://www.iso.org/standard/70660.html
- Interact Analysis — Mobile Robots Market research and forecasts. https://interactanalysis.com/
- LogisticsIQ — Mobile Robots (AGV/AMR) Market Report. https://www.thelogisticsiq.com/
- MHI (Material Handling Institute) — AMR and AGV Industry Groups. https://www.mhi.org/
- VDMA Robotics + Automation. https://rua.vdma.org/en/
- The Robot Report — Industry news and analysis on robotics. https://www.therobotreport.com/
- Modern Materials Handling — Industry publication. https://www.mmh.com/
- DC Velocity — Distribution and logistics journalism. https://www.dcvelocity.com/
- Daifuku Co., Ltd. — AGV systems. https://www.daifuku.com/
- Dematic (KION Group). https://www.dematic.com/
- Mobile Industrial Robots (MiR), Teradyne Robotics. https://www.mobile-industrial-robots.com/
- OTTO Motors by Rockwell Automation. https://ottomotors.com/
- AGILOX Services GmbH. https://www.agilox.net/
- Seegrid Corporation. https://www.seegrid.com/
- BlueBotics SA (ZAPI Group) — ANT Navigation. https://www.bluebotics.com/
- Locus Robotics. https://locusrobotics.com/
- PUDU Robotics Official Website. https://www.pudurobotics.com/